Next: Lessons learned and relation Up: Babybot: an artificial developing Previous: Babybot: an artificial developing Contents
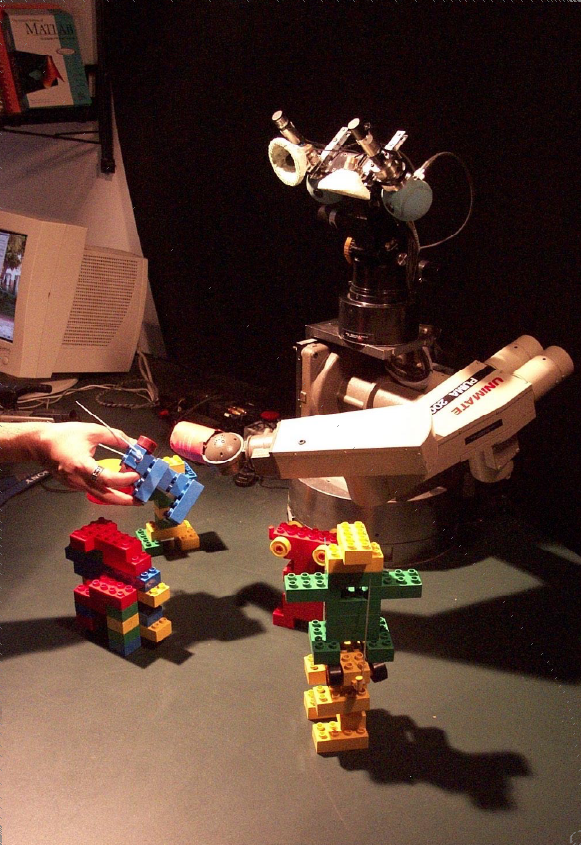
It was constructed to be a test bed for various theories of human development, and is thus constructed with biologic realism in mind. For example, the robot observes the world through a high-resolution fovea and a progressively lower resolution periphery. Furthermore, it includes two microphones, an inertial device and motor encoders (that can effectuate movement for 12 DoF3.7).
|
Erik de Bruijn 2007-10-19
 (b)
(b)